reset.
description.
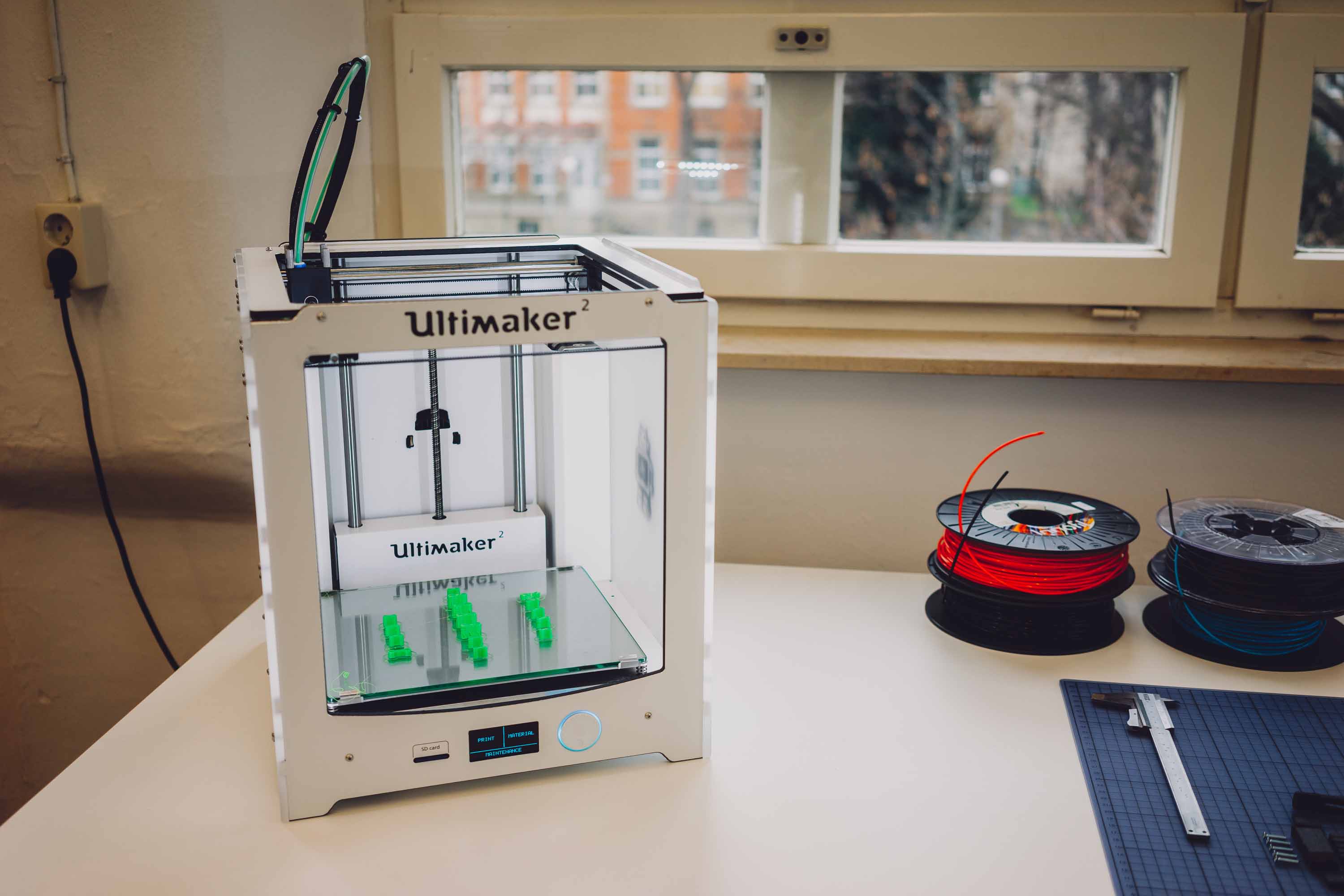
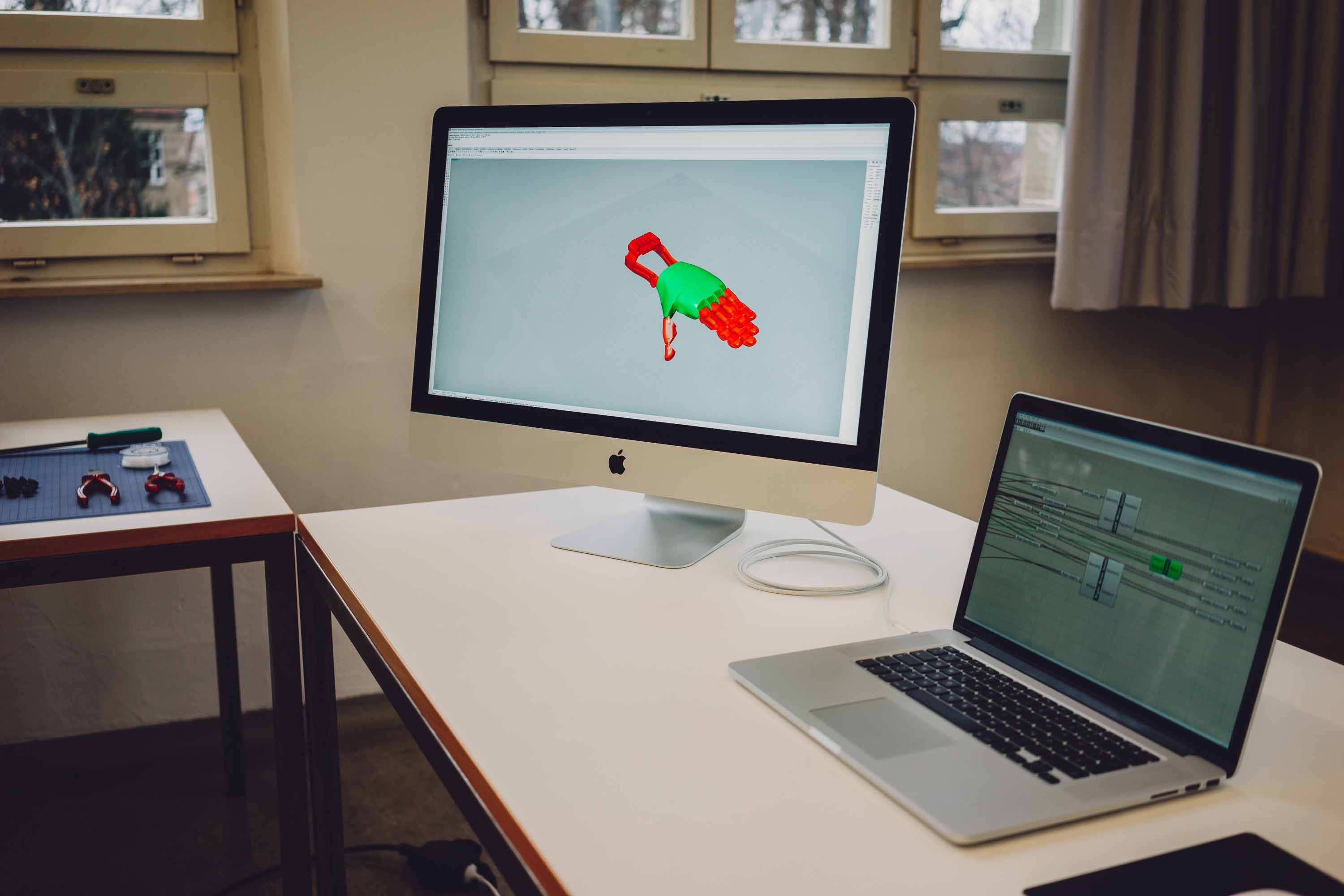
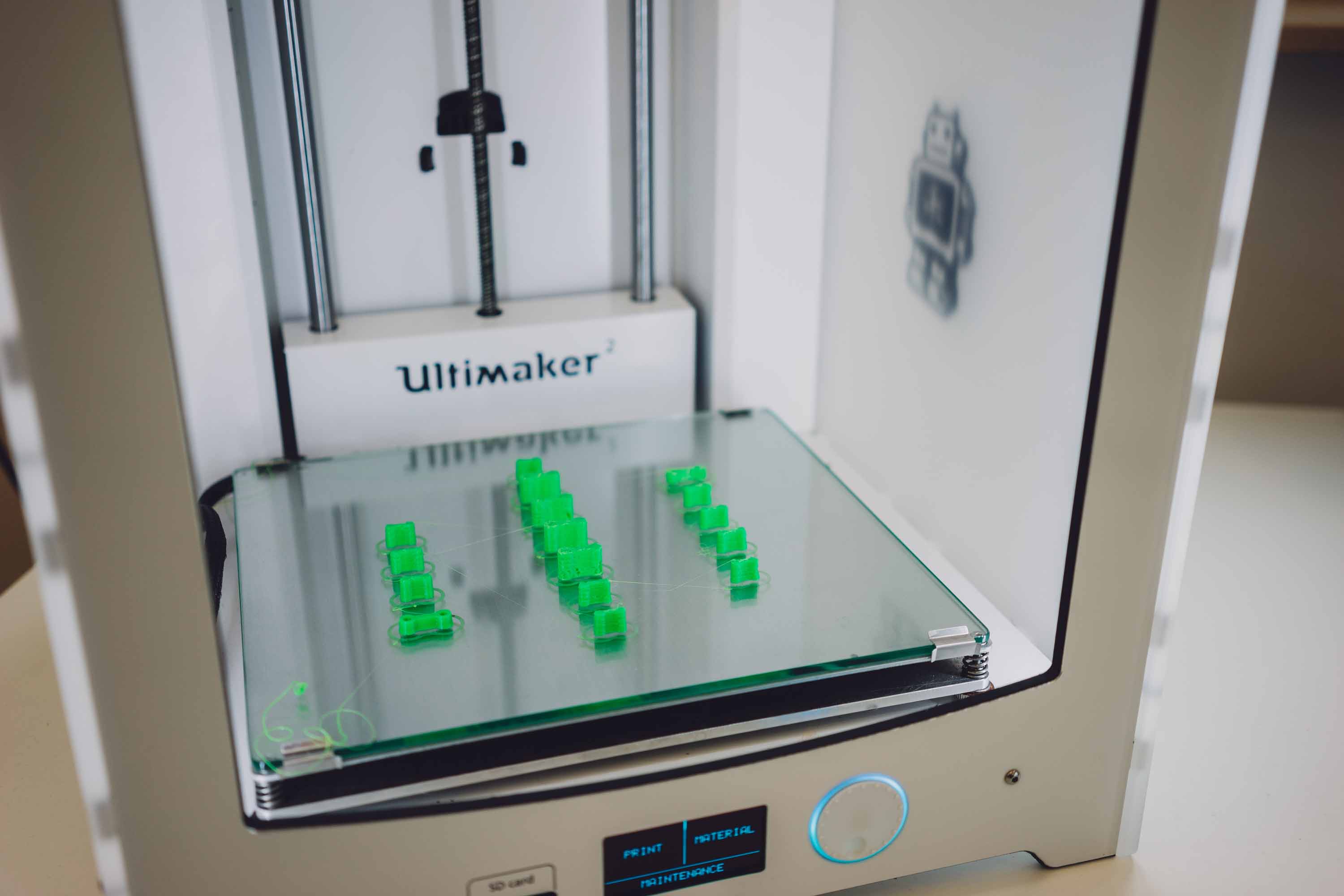
reset. – 3D printable parametric prosthetics. For my graduating project at Merz Akademie, I worked together with the e-nable community to develop and improve their parametric prosthetic models.
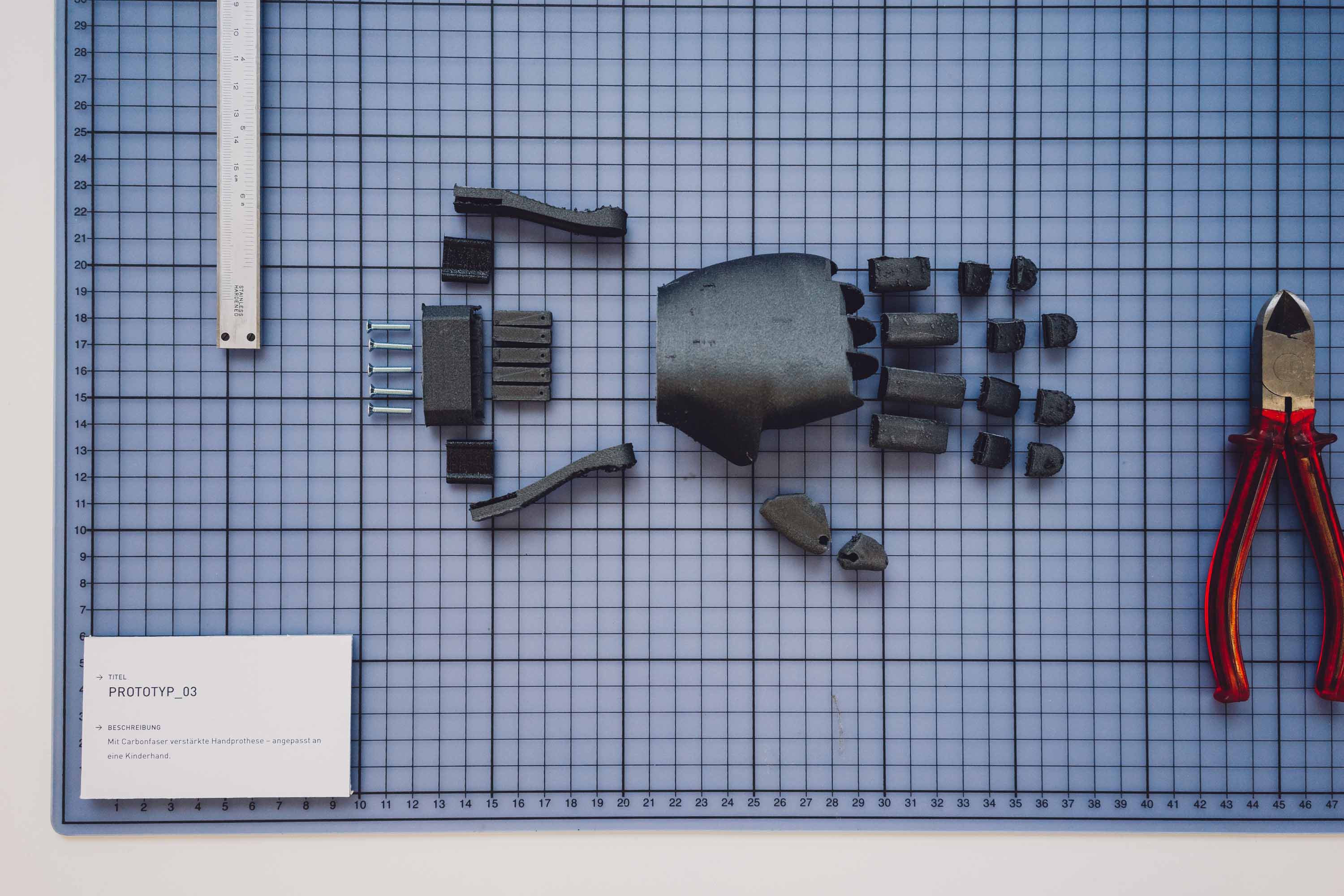
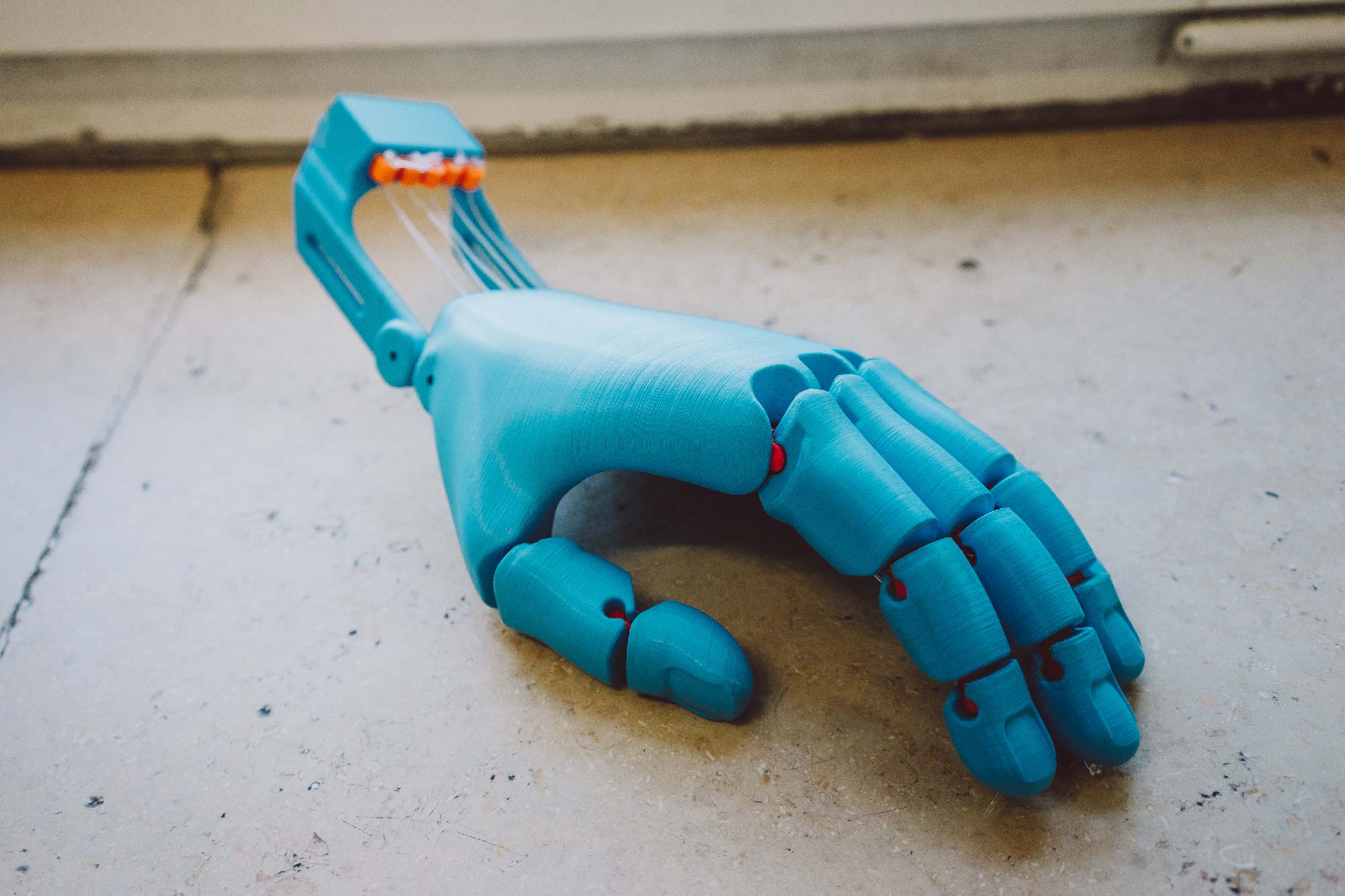
During the project, I developed a fully parametric geometry for 'Flexy-Hand 2', originally designed by Steve Wood. The fitting or sizing of a 3D printable prosthetics is one of the biggest challanges in the design and production process. The exact measurements of the recipient have to be used to achieve a snugly fitting result. More than 10 parameters are now in use to generate the final geometry. The full resizing/refitting process is now dramatically simple and broken down from hours to minutes. Additionally to the parameterization, some minor design changes are taking affect in the new version of 'Flexy-Hand 2'
fitting.


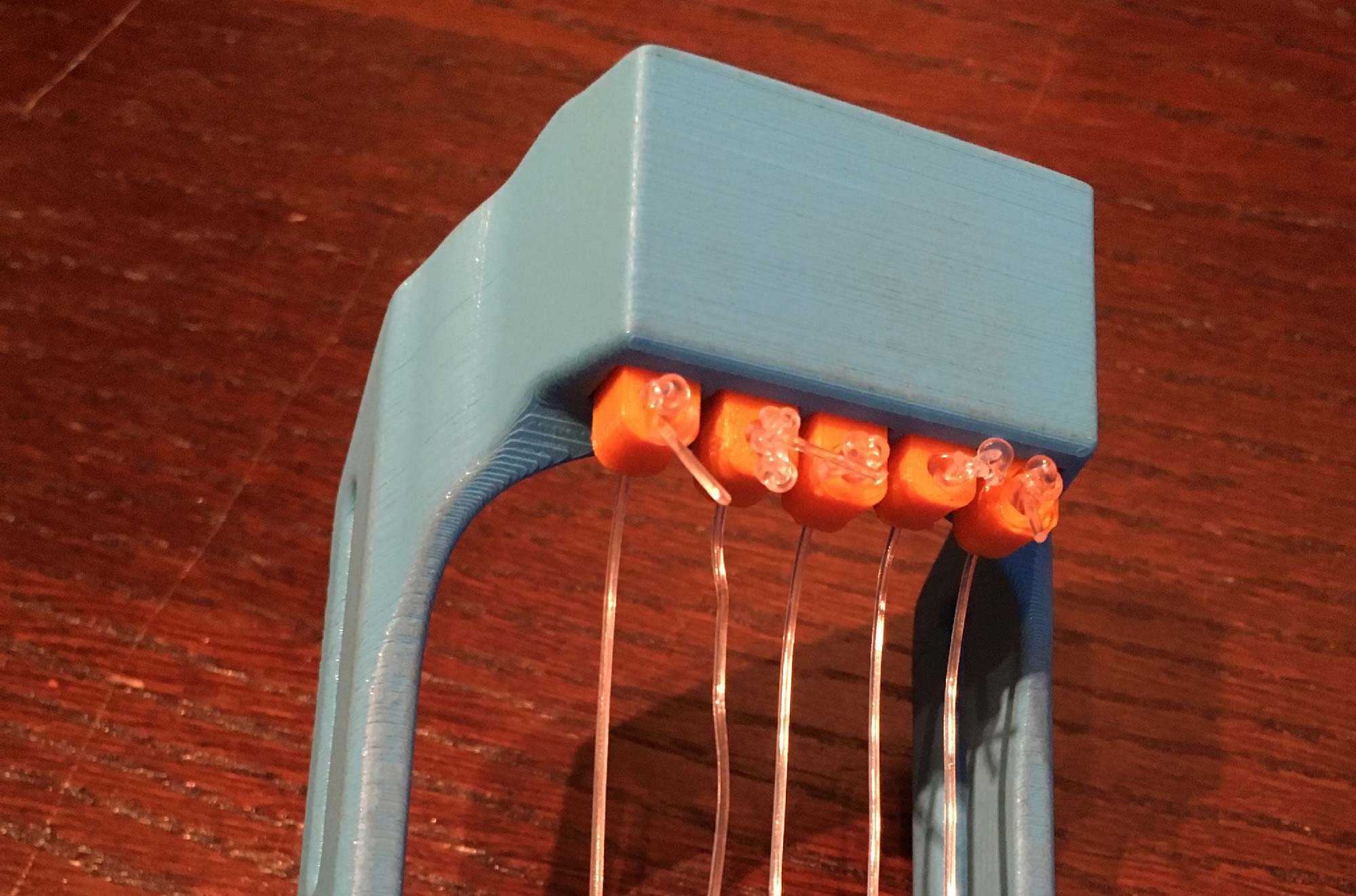
wrist design.


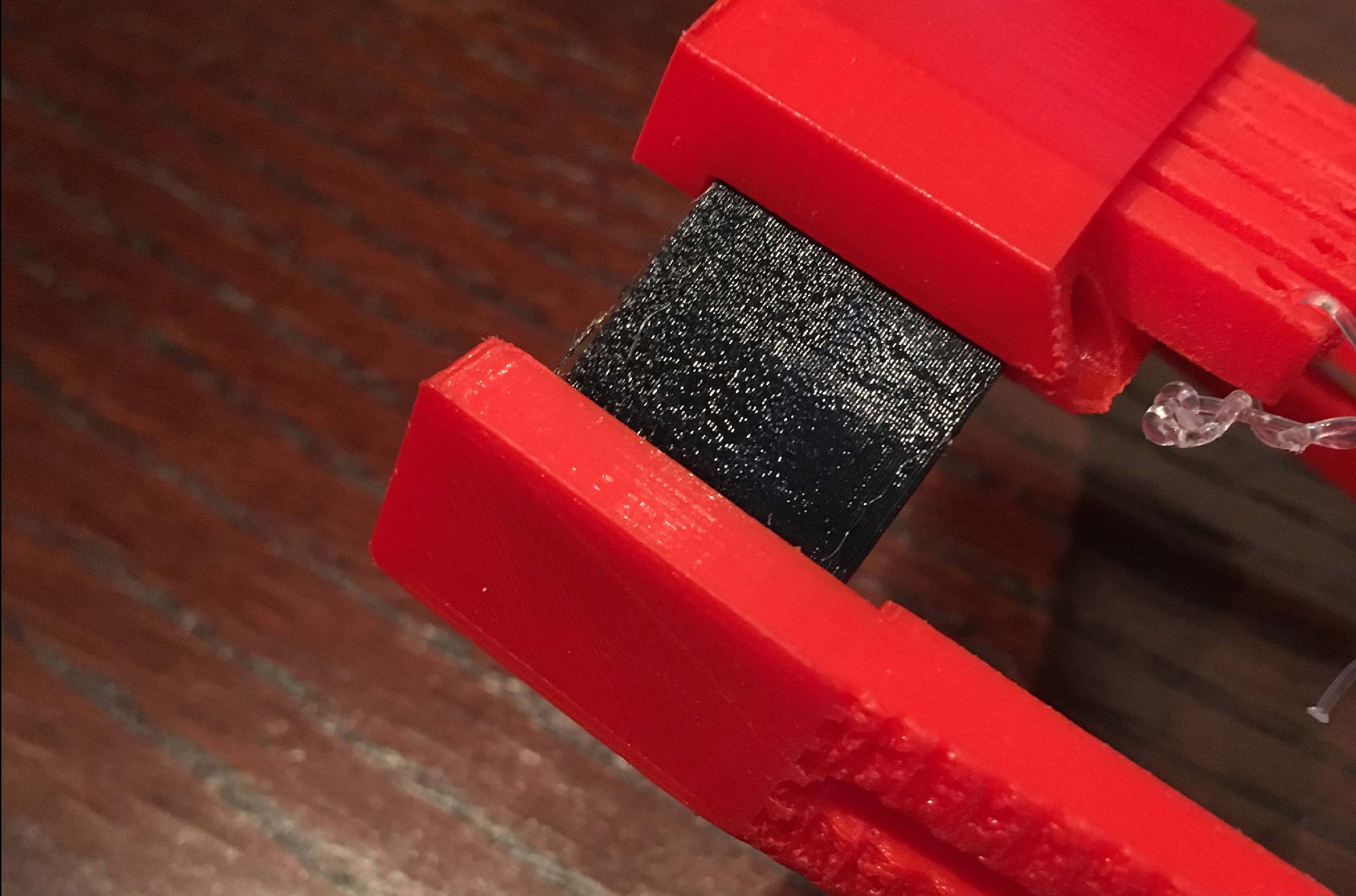
gauntlet design.